
步进电机是一种将电脉冲信号转换成相应角位移或线位移的电动机。每输入一个脉冲信号,转子就转动一个角度或前进一步,其输出的角位移或线位移与输入的脉冲数成正比,转速与脉冲频率成正比。因此,步进电动机又称脉冲电动机。
1.电机介绍
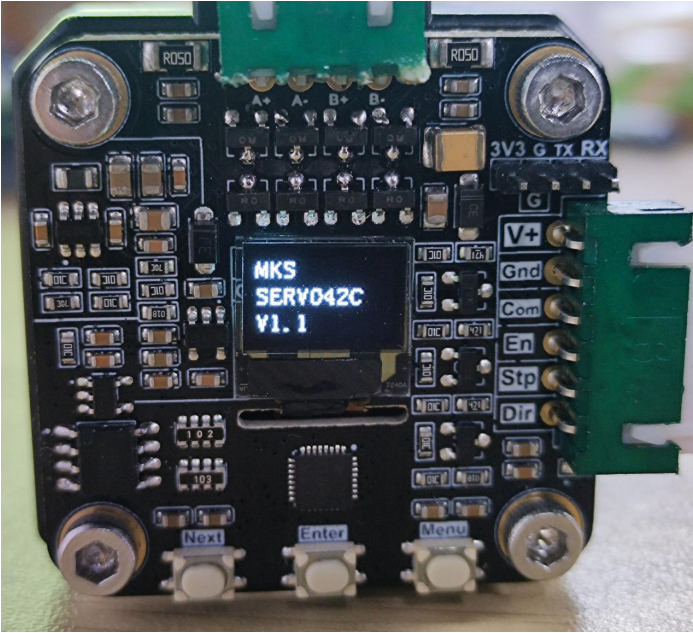
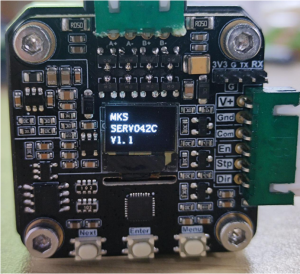
板载3个小按键,从左到右分别是:
Next :向下选择
Enter :确认选择
Menu :进入/退出参数设置菜单
查看参数方法:按Menu键进入菜单->按Next键向下选择->按Enter键进入子选项,进入后就可以看到该选项当前值是多少了。
参数设置方法:进入子选项后,选择另外的值按Enter确认选择就可以,会自动保存,立即生效 ,不需要断电重启。
参数设置菜单说明:
- CAL:编码器校准
闭环模式下对编码器进行线性化插值和电角度对齐,可以提高编码器的
线性精度,校准前请确保电机类型选择正确。 - MotType:电机类型选择
根据自己的步进电机类型进行选择,修改该选项后,在闭环模式下需要
重新对编码器进行校准。
0.9°:电机是 0.9 度的步进电机
1.8°:电机是 1.8 度的步进电机 - Mode:控制模式选择
CR_OPEN:开环控制模式,不需要编码器就能运行。
CR_LOOP:矢量闭环控制模式,有编码器反馈防丢步;
CR_UART:串口直接控制模式,TTL 串口发命令进行位置/正反转的控制。 - Ma:设置电流档位
设置开环模式的运行电流档位,闭环模式/串口控制模式会根据负载大小
自动调整电流的大小,变电流技术。
0
200
…
3000 - MStep:设置细分步数(默认 16 细分)
支持 1~256 任意细分,其中常规细分 1、2、4、8、16、32、64、128、
256 可以在屏幕上进行设置,其他细分如 67 细分需要用串口发命令进行设
置,请参考‘串口通讯’一节进行操作。
1
2
…
256 - En:设置 En 引脚的有效电平
H :高电平有效,外部输入高电平(3.3V 以上)可以使能闭环驱动板。
L :低电平有效,外部输入低电平(0V)可以使能闭环驱动板。
Hold:一直保持有效,此时 En 引脚不受外部控制。
注:如果没有使能驱动板,电机会像没通电一样,用手轻轻就可以
拧动电机轴,你发脉冲它也不会转。 - Dir:设置电机转动的正方向
CW :顺时针旋转为正方向
CCW:逆时针旋转为正方向
注:如果方向不对(特别是用在 3D 打印机/雕刻机),不需要修改
主板的固件,只需要修改该选项即可。 - AutoSDD:设置自动熄屏功能
Disable:关闭
Enable :使能
注:使能该选项后,在 7 秒内无任何按键操作就会自动熄灭 OLED 显
示屏,按任意按键就可以重新点亮屏幕。 - Protect:设置堵转保护功能
Disable:关闭
Enable :使能
注:使能该选项后,驱动板如果检测到电机发生堵转就会触发堵转
保护,自动关闭驱动器,并在屏幕上显示“Wrong Protect Enter..”。 - MPlyer:设置内部 256 细分插补功能
Disable:关闭
Enable :使能(默认)
注:使能该选项后,能够有效的减少电机低速运动时的震动和噪音,
相当于把你当前的细分内部插补到最高 256 细分去跑。 - UartBaud:设置串口通讯波特率
Disable
9600
19200
25000
38400
57600
115200
注:如果你要用到串口,需要设置驱动板的串口通讯波特率。 - UartAddr:设置串口通讯地址
0xe0
…
0xe9
注:可以通过该选项来设置驱动板的串口通讯地址。 - O_Mode:设置单圈上电自动回零模式
Disable :关闭单圈上电自动回零功能
DirMode :方向模式(回零方向在 O_Dir 菜单上设置)
NearMode:就近模式(往最靠近零点的方向回零) - Set O:设置单圈上电自动回零的原点(需要先设置 O_Mode 的模式)
- O_Speed:设置单圈上电自动回零速度档位
0 :最快的档位
…
4 :最慢的档位 - O_Dir:设置单圈上电自动回零的回零方向
CW
CCW - ACC:设置闭环驱动板内部的加速度值
Disable
286
412
538
664
790
916
1042
注:该选项是预留和扩展,保持默认值‘Disable’。 - Exit:退出参数设置菜单
2.电机接线
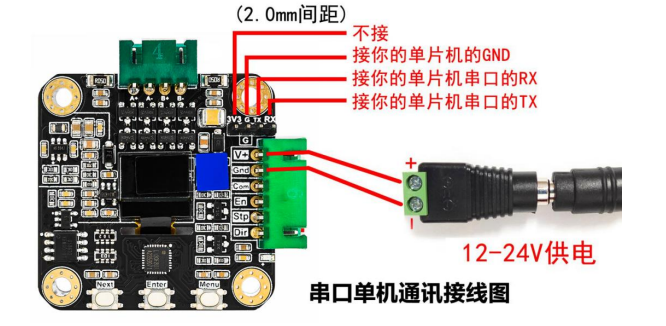
注意电机上TX接单片机RX,RX接单片机TX!!!初始化串口设置时需要格外注意!
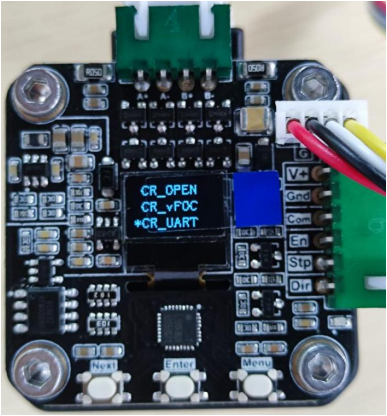
3.电机配置串口
打开串口直接控制功能
- 在菜单->Mode中,开启串口直接控制功能。
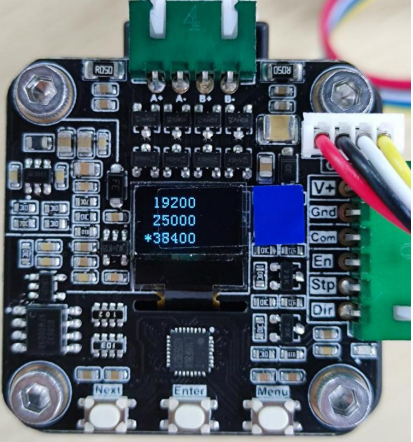
电机设置驱动板波特率
- 在菜单->UartBaud中,选择38400。
电机设置驱动板串口通信地址
- 在菜单->UartAddr中,选择0xe0
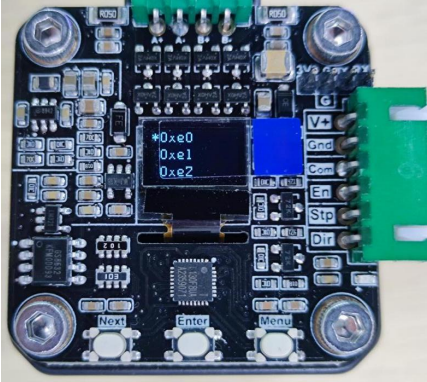
串口通讯地址默认为0xe0,可以选择其他,但上传的数据也要相应的变化。
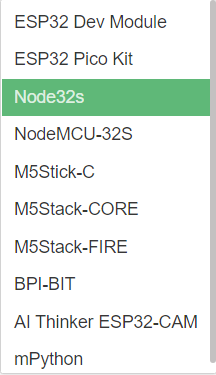
4.选择ESP32主控板
根据主控板型号选择板号:
5.初始化串口
在Mixly左侧菜单中找到串口界面:
ESP32主控板共有三个硬串口,分别为Serial,Serial1,Serial2,其中有一个串口需要与电脑通讯调试,所以一个ESP32主控板最多只能控制两个步进电机。

选择初始化硬串口:

此处设置为RX的引脚应当接电机的TX,设置为TX的引脚应当接电机的RX。
6.建立传输数组
设置细分(对应屏幕上的“MStep”选项):
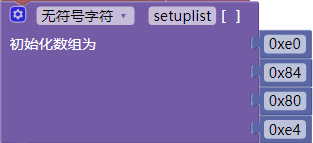
图示为设置电机细分为128
0xe0 为先前设置的串口通讯地址
0x84 为设置细分的命令地址(CMD ID)
0x80 为需要设置的细分( 十六进制 0x01~0xff 对应 十进制 1~255 ,而 0x00 对应 256 )
最后一项为 tCHK ,需要将前面所有项加起来,取结果的最后两位。
如:e0 + 84 + 80 = 1e4 故 tCHK 项为 0xe4。
设置直接控制位置:
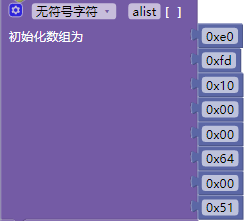
图示为控制电机在128细分下转动360度
0xe0 为先前设置的串口通讯地址
0xfd 为串口直接控制电机转动位置的命令地址(CMD ID)
0x10 设置转动速度(speed)(0x00~0x80 对应 正转 0~127 档,0x81~0xff 对应反转 0~127 档)
接下来后面四位 0x00 0x00 0x64 0x00 为需要发送的脉冲数
0x51 为 tCHK,即前面所有十六进制项的和取最后两位。
- 电机转速如何计算?
Vrpm = (speed × 3000)/(Mstep × 200) 1.8 度电机
电机默认为1.8度电机。
Vrpm = (speed × 3000)/(Mstep × 400) 0.9 度电机
也就是说,细分越多,电机同档位下的转速就会越慢。
- 如何推算我们需要发送多少脉冲数?
细分的意思是:要发送多少脉冲数才能使电机转动1.8度/0.9度。
由于电机为1.8度电机,
在16细分下需要发送16条脉冲才能使电机转动1.8度,
在128细分下需要发送128条脉冲才能使电机转动1.8度。
以此类推。
因此,想要让电机在16细分下转动360度,需要发送 (360/1.8)*16 = 3200 条脉冲!
同理,想要让电机在128细分下转动360度,需要发送 (360/1.8)*128 = 25600 条脉冲!
7.发送串口数据


使用串口原始输出,输出格式为列表名称 + 列表长度。
8.更多运用
详见步进电机说明文档
密码:dqd2

请登录后发表评论
注册